1 Motivation
论文对DETR的二分图匹配下手,指出二分图匹配是一个动态且不稳定的过程,故影响了训练的效率。众所周知二分图匹配是最优化cost matrix来找到最优匹配(match指query和gt object一一对应),但是训练前期,匹配肯定是瞎猜来着,矩阵内的损失稍有变化,最优匹配也就发生变化了,就导致训练收敛慢了。那为什么匹配变了训练就慢呢?
DETR-like的模型基本上是two-stage的,第一阶段就是“learn good anchors“,也就是找到query-gt box的match;第二阶段是”learn relative offsets“,也就是负责微调bounding box。你第一阶段都搞不好,第二阶段也别想搞好了。本来你负责微调query1-gt box1,下一个epoch又去微调query1-gt box2🙄
So 本文提出denoising task作为训练的捷径,基本上就是多一项任务让matching的任务更顺利完成然后就能尽早去学习偏移了吧。
2 Why denosing can help?
2.1 稳定二分图匹配
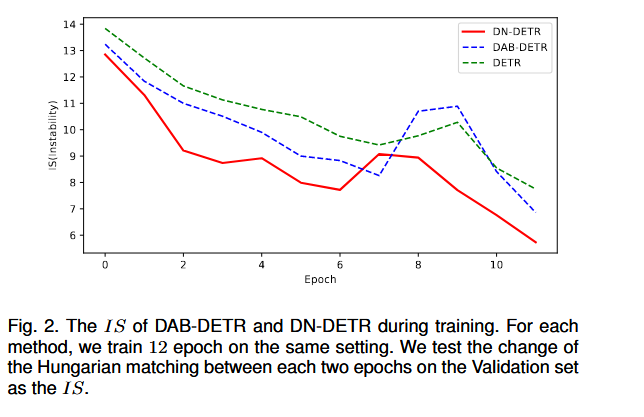
论文提出了一个指标$IS$来负责表现denoising任务对于稳定二分图匹配是有效的。
假设decoder预测的objects为$\text{O}^\text{i}=\{O_0^i,..,O_{N-1}^i\}$,其中$i$为第i-th个epoch,$N$为预测的objects的个数。又设真实object为$\text{T}=\{T_0,..T_{M-1}\}$,其中$M$为真实objects的个数。计算index vector $\text{V}^\text{i}=\{V_0^i,...,V_{N-1}^i\}$来第i-th epoch的存储匹配结果。
$$ V^i_n = \begin{cases} m, & \text{if } O^i_n \text{ matches } T_m \\ -1, & \text{if } O^i_n \text{ matches nothing} \end{cases} $$那么$IS^i=\sum_{j=0}^N\mathbb{1}(V_n^i\not = V_n^{i-1})$
直白来说,就是第n-1个epoch,预测的$O_{n-1}^i\text{ match }T_5$,既第i个qurey对应第5个gt object,下一轮预测的$O_n^i\text{ match } T_4$,那么 $IS^i$记为 1,既前一轮跟后一轮预测的索引不同。结果如下图所示,denoising任务确实有用,但为什么,unknown..
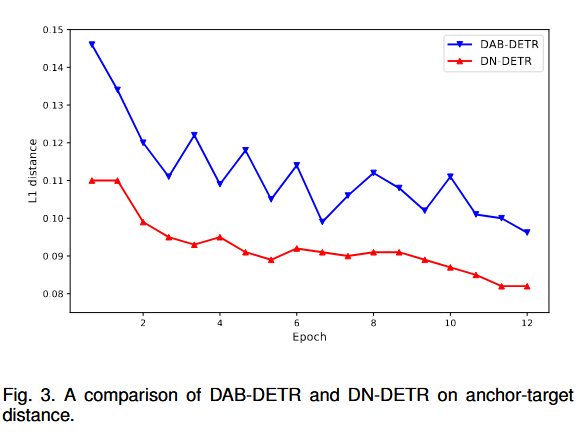
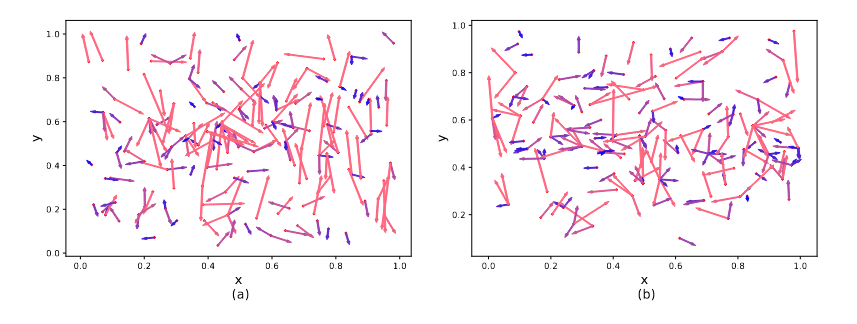
2.2 更局部地query search
从DETR的论文可以知道,positional queries有多种operating modes,导致query search是在一个偏大的范围内进行的。DN-DETR在原始anchor(positional queries)和targets之间有更短的平均距离。一种解释就是denosising tasks使得模型能够去重建bounding box,所以可以让query search更局部,这样每个query的关注点也会在附近,减小与其他queries的冲突预测。我感觉是一个毫无解释的解释。
下面的图展示了训练的难度,越长则是训练难度越大。
3 DN-DETR method
上帝视角版:
DN-DETR要做两个任务,一个是match task,另一个是denoising task,这两个tasks都是用queries做的,queries之间是独立的,比如前50个queries做denoising task,后300个queries做matching task。而noise queries是从match queries中采样来的,然后对labels和box加噪形成。然后一同送入transformer,并配置专用的attention mask,得到输出后,分别做正常的检测任务以及重建任务。
当我们forward到transformer前,就要构建noise queries和改变match queries。
3.1 Bounding Box加噪
对(x,y,w,h)分别加噪,其中(x,y)表示边界框中心,(w,h)表示边界框的高和宽。
对于中心坐标,论文指出给(x,y)增加随机噪声($\Delta x,\Delta y$) ,且确保$|\Delta x|<\frac{\lambda_1w}{2};|\Delta y|<\frac{\lambda_1h}{2}$,实验设置$\lambda_1=0.2$时效果最佳。这样可以确保增加噪声后,中心坐标仍然在边界框内。
对于边界框高宽,则随机在$[(1-\lambda_2)w,(1+\lambda_2)w]$采样$w$,$h$的采样也一样。
但是下边源码的做法时,从[0,1]中均值采样后,乘上2减去1,然后再乘以$\lambda_2$使得值域变为$[-0.4,0.4]$,然后乘以(x,y,h,w)
if box_noise_scale > 0: # lambda 2 = 0.4
diff = torch.zeros_like(known_bbox_expand) # 构建一个known_bbox_expand同样大小的全0矩阵,用来放中心坐标和高宽
diff[:, :2] = known_bbox_expand[:, 2:] / 2 # 中心点坐标 (w/2, h/2),原本的coco数据集的(x,y)是左上角坐标,还是不太了解coco数据集
# 在原 gt boxes 上加上偏移量,并且保证加噪后框的中心点在原来的框内
# torch.rand_like(known_bbox_expand) * 2 - 1.0 的值域是 [-1,1), 乘上lambda 2后为 [-0.4,0.4],未超过0.5,所以坐标中心还在边界框内
known_bbox_expand += torch.mul((torch.rand_like(known_bbox_expand) * 2 - 1.0),
diff).cuda() * box_noise_scale
known_bbox_expand = known_bbox_expand.clamp(min=0.0, max=1.0) # 限制范围
3.2 Labels的加噪
Query包含content和position部分,所以理应来说,content也需要加噪。原本DAB-DETR中,content部分对应的是decoder embedding,他是不可学习的仅作为语义载体。labels进行加噪肯定不是简单地将label为1的变成label=8就行。所以论文里设置了一个class embedding,然后将label序号传入到embedding中进行一个look up的操作,得到对应的label vector来表示label。
源码的加噪做法是,随机抽取indices,然后在[0, num_class-1]中随机生成跟indices尺寸一致的new label,然后再将得到的(indices, new labels) 代替对应位置的GT labels
if label_noise_scale > 0: # lambda 1 = 0.2
p = torch.rand_like(known_labels_expaned.float()) # 从均匀分布中采样shape为 known_labels_expaned.shape的浮点数,表示概率
chosen_indice = torch.nonzero(p < (label_noise_scale)).view(-1) # 被选中的gt objects的索引,要向里面加噪了
new_label = torch.randint_like(chosen_indice, 0, num_classes) # 生成形如chosen_indice的tensor,并随机选择[0,num_classes]中任意类别作为噪声类别
known_labels_expaned.scatter_(0, chosen_indice, new_label) # 在 dim0 中使用 (chosen_indice,new_label)作为索引-值,写入到known_labels_expaned对应位置
3.3 DN Groups
为了增加denoising efficiency,设置多个denoising groups,每个groups施加不同程度的噪声,有点one-to-many的意思。分组的步骤其实是在加噪之前进行,先进行分组,然后再去加噪。
基本上进行repeat操作即可,但是要注意索引是如何利用起来的。
### --------------- 2) 分配noise queries标签 --------------------------
if training:
known = [(torch.ones_like(t['labels'])).cuda() for t in targets] # known:list[list] ,value均为1,内部list长度为每张图像的的object个数,外部list长度为batch size
know_idx = [torch.nonzero(t) for t in known] # # torch.nonzero() 返回张量中不为0的索引,比如[[0],[1],[2]],搞不懂什么作用
known_num = [sum(k) for k in known] # 每张图的GT Objects个数
# you can uncomment this to use fix number of dn queries
# if int(max(known_num))>0:
# scalar=scalar//int(max(known_num))
# 2.1 以下部分是对gt object在整个batch中计算索引
unmask_bbox = unmask_label = torch.cat(known) # (batch_obj,1),值为1
known_indice = torch.nonzero(unmask_label + unmask_bbox)# (batch_obj,1),值为每个obj在整个batch的索引号
known_indice = known_indice.view(-1) #(batch_obj)
known_indice = known_indice.repeat(scalar, 1).view(-1) # obj在整个batch的索引复制到所有denosing group, #(batch_obj * num_group),比如这里是[50];
# 2.2 准备 gt labels和 gt boxes
labels = torch.cat([t['labels'] for t in targets]) # (batch_obj,1),值为每个obj的类别索引
boxes = torch.cat([t['boxes'] for t in targets]) # # (batch_obj,4),值为每个obj的边界框
batch_idx = torch.cat([torch.full_like(t['labels'].long(), i) for i, t in enumerate(targets)]) # obj所在图像索引号
known_labels = labels.repeat(scalar, 1).view(-1) # obj的labels复制到整个dn groups
known_bid = batch_idx.repeat(scalar, 1).view(-1) # obj的所在图像的索引复制到整个dn groups
known_bboxs = boxes.repeat(scalar, 1) # obj的bbox坐标复制到整个 dn groups
known_labels_expaned = known_labels.clone() # 复制一份,用于加噪
known_bbox_expand = known_bboxs.clone()
标签分配(假设image1有3个objects,image2有2个objects):
known表示batch内每张图像的objects个数,比如[[1,1,1],[1,1]] 表示image1三个objects,image2两个objectsknown_indice表示所有objects在整个batch的索引,如[0,1,2,3,4]。然后使用repeat操作复制到整个dn groups上,如果dn groups为5个,则复制在第0维5次,shape为[5,5]labels和boxes都是从gt objects的annotation中提取batch_idx表示objects所在的图像索引,比如[0,0,0,1,1]复制到所有dn groups
目前为止,总览图如下
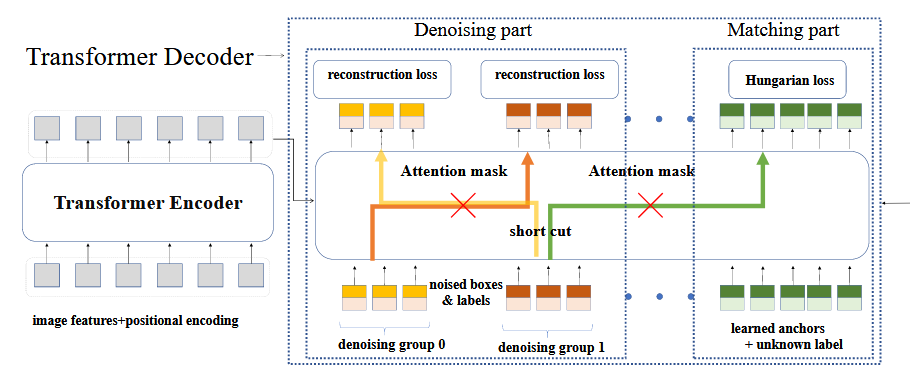
3.4 Attention mask
二分图匹配(match part)是根据类别、边界框的L1和GIoU Loss去得到最优匹配的,而noise query是从真实objects中采样然后加噪而来,所以自身是带有边界框信息(类别信息可能有可能没有),所以match attention就不应该看到noise query的信息,所以要mask掉。同理,不同queries之间也不能透露信息。
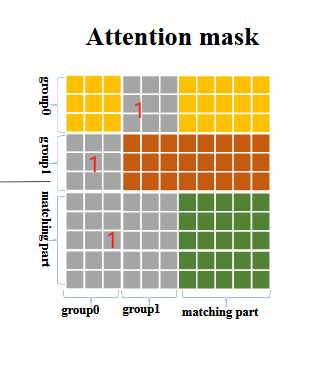
所以attention mask设计为:(灰色部分为1,表示看不见)
matching parts看不见noise parts
不同的noise groups互相看不见
然后就可以输入进transformer中,输出output之后,切割开output,分别去计算不同的Loss(相当于做不同的任务),就大功告成了。
参考
Paper Link🔗[2203.01305] DN-DETR: Accelerate DETR Training by Introducing Query DeNoising (arxiv.org)