1 回顾DETR以及问题指出
1.1 DETR中transformer回顾
先来简单回顾一下DETR的transformer作用是什么:
Encoder的输入是特征图的某个像素点向量(又叫token),通过self-attention,得到其与other tokens的相似度(similarity),通俗理解就是,位于🐱头的token理应和位于🐱jio的token相似度高,而与狗头或者牛马等不相同类别的物体的token相似度低。由下图的attention map可见,encoder的某一个token遍历其他所有token(包括自己)来学习自己应该关注哪些tokens,不该关注哪些tokens。可以说encoder的目的是掌握全局信息,是一种粗理解。
如何可视化attention map: 计算出来的attention_weights有[H*W]个,reshape回 [H,W],然后再按照attention_weights去高亮每个像素点就会得到attention map

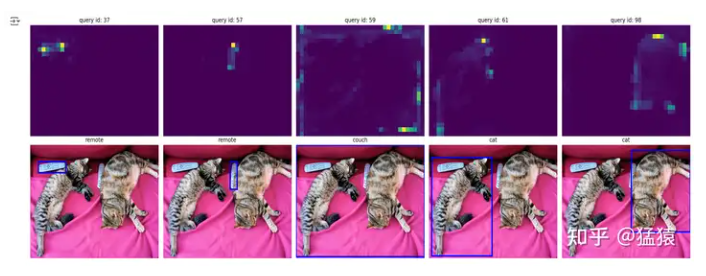
Decoder的输入object query同样可以理解为特征图的某一个像素点,只不过它是随机的,这些像素点可以理解为检测框的质心。在训练过程中,这些质心不断调整自己的位置和区域,从而学习到自己应该关注的部分。由下图可知,每个object query学习的是自己应该关注的检测框的范围。
1.2 DETR两个重要问题
DETR存在两个重要问题:
(1) 训练时间太长(300 epochs training on coco2017)
(2) 难以检测小物体
已知transformer的计算公式为:
$$ Attn = \sum_{m=1}^M \{W_m [\sum_{k\in\Omega_k}exp(\frac{x_q^TW_q^TW_kx_k}{\sqrt{D_k}})]W_vx_v\} $$如果$x_q:(N_q,C); W_q:(C,C)$,那么$Wq*x_q$的计算复杂度为$O(N_qC^2)$,所以我们可以得知attention的计算复杂度为$O(N_qC^2+N_kC^2+N_qN_kC)$,又$N_q=N_k>>C$,故最终的复杂度可以表示为$O(N_qN_kC)$
在DETR中,$N_q=N_k =H*W$,所以复杂度为$O(H^2W^2C)$,复杂度和特征图的面积成平方比例。而且这是个全局attention,一个token就必须和H*W个tokens做注意力计算,这也就预示着特征图的尺寸不能太大,而且也不能使用多尺度特征图(多个特征图),不然计算开销吃不消。且初始化时,Q和V遵循均值为0,方差为1的均匀分布
所以分子$exp(0) = 1, Attn =\frac{1}{N_k}$ ,因为$N_k$很大,所以Attn约等于0,会导致在训练初期的梯度随机,且需要很长时间才能让某一个token能关注到特殊的keys上。
而不能检测小物体通常是因为特征图尺寸不够大的问题,比如一个遥控器在某一个特征图上可能就一个点,一个点当然很难区分。若是可以用更大的特征图,遥控器的表达可能就是一个区域了。
2 Deformable DETR改进
针对以上两个问题,deformable提出两个改进方案:
(1)全局attention改为局部attention
(2)采用多尺度特征图
2.1 局部attention
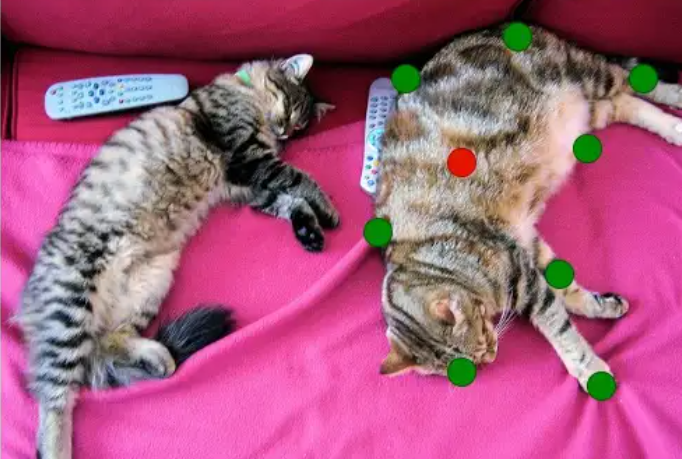
借鉴deformable convolution的思想,一个reference point(红点,也是token)只需要跟周围的sample points(绿点)做attention,这样可以加快收敛以及缓解特征图分辨率的问题。且理想情况也是,只需要关注物体周围的区域,就可以大致知道物体的shape以及label了。
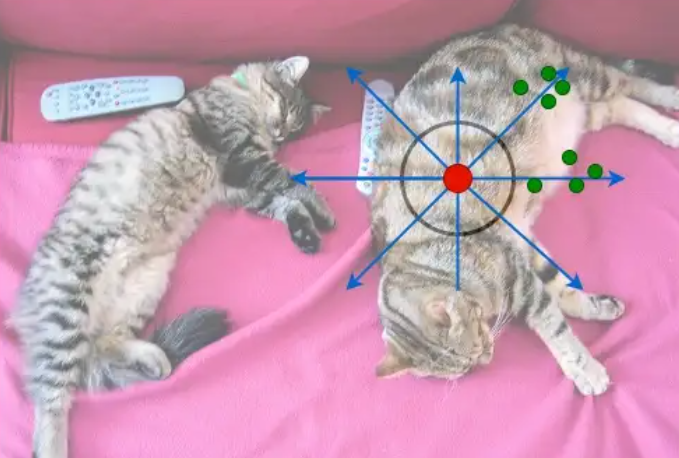
既然如此,我们怎么规定reference points以及sample points呢?对于sample points,我们可以以reference points为中心的分8个方位(n_heads=8,约束方向),每个方向采样4个sample points(n_points=4),对于每个sample point,只要根据reference point去学习其偏移量(offsets),既可以由reference point和offsets得到sample points,然后该reference point和这些sample points去做注意力计算即可。模型不断学习update,改变周围的sample points的位置,这样的机制叫deformable attention。其实本质上这是限制其只与其周围像素点做attention的一种手段。不同的方向则有不同的head去构成。
2.2 单尺度deformable attention
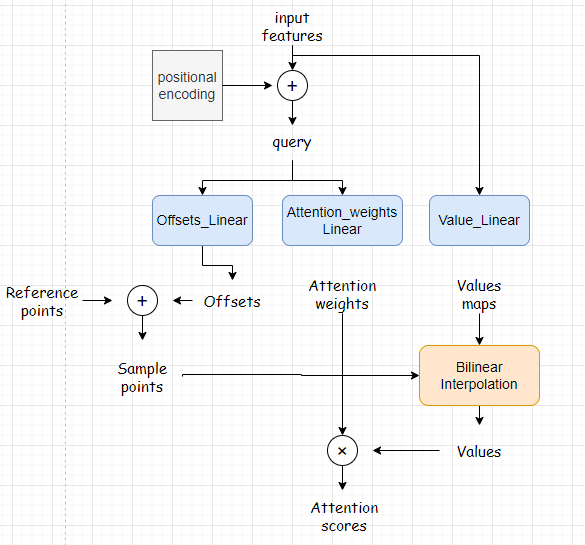
workflow如上图所示,input feature为backbone的输出,加上positional encoding之后变成query。这里设立三个FFN,其中一个通过input features生成value maps,其他两个通过query生成偏移以及attention weights(对的,此处的attention weights并不是通过$softmax(\frac{Q^TK}{\sqrt{d_k}})$计算得来)。reference points的实现源码稍后分析,总之根据reference points和offsets就可以得到sample points,然后通过插值的方法得到每个sample points的value(因为reference points很大可能是小数坐标),最后就可以得到attention scores了,忽略掉很多细节,看上去挺简单的。
计算公式为
$$ \text{DeformAttn}(z_q, p_q, x) = \sum_{m=1}^{M} W_m \left[ \sum_{k=1}^{K} A_{mqk} \cdot W'_m x (p_q + \Delta p_{mqk}) \right] $$$K$表示采样点个数,远远小于$HW$, $x(.)$表示插值函数,此时计算复杂度变为$O(2N_qC^2+HWC^2)$
2.3 多尺度deformable attention
检测小物体的关键就是能运用多尺度的特征图。backbone resnet50中,取出C3、C4、C5的输出产出3种特征图,最后一个尺寸的特征图通过3x3卷积而来。一张图像将得到4张特征图(n_levels=4),其中前三种特征图通过1x1卷积降维,使之所有特征图的维度都相同(hidden_dim),这样得到的尺寸就分别是原图像宽高WH的1/8、1/16、1/32、1/64。
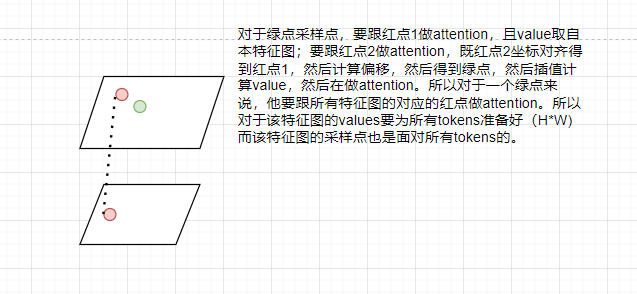
我们想做的是,对于每一张特征图的任意一个token,我们希望找到其在其他特征图的位置(坐标),这样除了在本特征图做deformable attention,还可以在其他尺寸特征图做deformable attention。最后通过某种方式,将各个尺度的attention结果综合起来。(所以我们只会知道一个特征图上的像素坐标,而不知道其他特征图的像素坐标?我们已知的特征图是C5吗?)
坐标对齐:
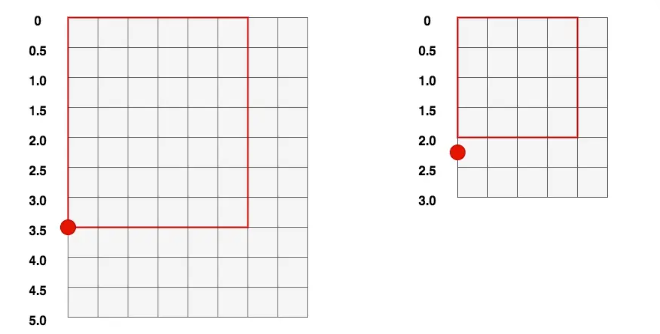
对于batch size大于1的情况,我们是会有padding操作的,而不同特征图之间的padding程度会不一样。那么我们就不可以用绝对坐标比例的方式取求得其他特征图的坐标:
由上面图举例可知,padding后左图1的3.5位置的比例为3.5/5.0=0.7;右图padding后0.7
比例位置的坐标为3.0*0.7=2.1,而3.5原来对应的是2.0才对。
我们用有效高度的方法来求得坐标:
设图1的高度H1,有效高度HE1,坐标p1; 图2的为2;
则我们可以知道p1/HE1 = p2/HE2, 所以得到 p1*HE2 / HE1 = p2;
此时除以H2,得p1/HE1 * HE2/H2 = p2/H2;
其中p1/HE1为图1的相对有效高度的坐标,HE2/H2为图二的有效高度比例;
这就可以得到图1的p1点,在图2的归一化的坐标。
这里还有一点需要注意的是,对于多尺度attention,我们除了加入2D位置编码,还会加入尺度层级位置编码(scale-level embedding)去区分像素query所在的特征图层数,该编码是随机初始化且可学习。
具体实现,会将不同的特征图的tokens展开成一排,作为attention的输入。(就是增加一维,大小为n_levels,然后展开酱紫)这样对于每一个head(方向)都需要学习 (n_levels, n_points)大小的attention weights, 最后将这几个attention weights一起做softmax。
对于一个token,我们可以得到其在自己特征图上的归一化坐标(既p1/HE1),然后用之前坐标对齐的方法去计算其他特征图的归一化坐标(乘上3个有效高度比例就得到3个特征图山上的归一化坐标表示),然后就可以在不同尺度下学习offsets,然后之后的操作就跟单尺度一样了。
3 全过程梳理
让我梳理一哈。
Images传入backbone得到4个input features,再reshape成符合transformer输入的形式(bs, HW, d_model)。这时候再与positional encoding相加则得到query(bs, HW, d_model),这里$H*W$表示所有的token数量,既4个特征图的所有tokens。
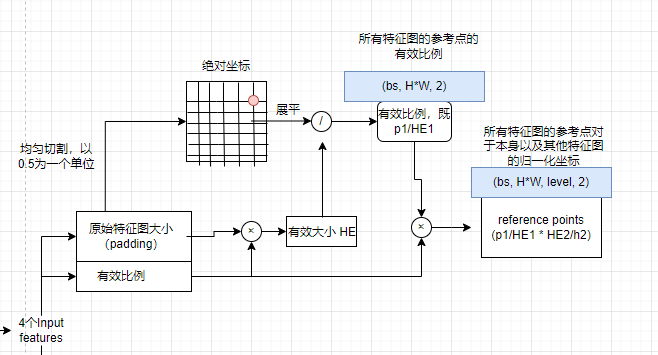
reference points初始化为对于每一张特征图,先按均匀分布在x和y方向切割,取其中心点。然后原始特征图大小乘上有效比例等于有效大小,然后中心点除以有效大小等于有效比例,既$p1/HE1$。最后在第1维concat,得到尺寸(bs, H*W, 2),表示所有特征图的reference points的有效比例。最后乘以valid_ratios,得到reference_points,尺寸为(bs, H *W, level, 2) , 表示对于所有特征图的reference points,其在该特征图以及其他特征图的归一化坐标。
sample_offset、value_proj、attention_weights都是Linear layers,特别注意的是对于偏移量的初始化:
设置8个方向的thetas 【0, pi/4, … 7pi/4】,此时shape为(8,)
设置8个方向的正余弦 grid_init,此时shape为(8,2)
将正余弦转换为米字,代码和展示如下,就得到【(1,0),(1,1),…(1,-1)】
进行尺度变换为(8,4,4,2),对应(head,level,point,2),此时同一个方向采样点的偏移都是一样的,对其进行区分,使得第一个采样点为(1,0),(1,1)…,第二个采样点为(2,0),(2,2)..等
最后就跟单尺度deformable attention展示的一样。需要注意的是最后的插值采样:
细品。
def ms_deform_attn_core_pytorch(value, value_spatial_shapes, sampling_locations, attention_weights):
"""
Args:
value: 尺寸为:(B, sum(所有特征图的token数量), nheads, d_model//n_heads)。对原始token做线性变化
后的value值
input_spatial_shapes: tensor,其尺寸为(level_num,2)。 表示原始特征图的大小。
其中2表是Hi, Wi。例如:
tensor([[94, 86],
[47, 43],
[24, 22],
[12, 11]])
sampling_locations:尺寸为(B, sum(tokens数量), nhead, n_levels, n_points, 2)。
每个token在每个head、level上的n_points个偏移点坐标(坐标是归一化的像素值),
每个坐标是按(w,h)表达的,注意不是(h,1)
attention_weights: 尺寸为(B, sum(tokens数量), nheads, n_levels, n_points)
每个token在每个head、level上对n_points个偏移点坐标的注意力权重
"""
# for debug and test only,
# need to use cuda version instead
N_, S_, M_, D_ = value.shape
_, Lq_, M_, L_, P_, _ = sampling_locations.shape
value_list = value.split([H_ * W_ for H_, W_ in value_spatial_shapes], dim=1) # 将value按照特征图进行split,得到长度为(level)的tuple,每一个值为(bs,H_*W_,head,head_dim)
# H_*W_表示某一个特征图的大小,head把个头,head_dim表示一个value为长度head_dim的向量
sampling_grids = 2 * sampling_locations - 1 # 将采样点从(0,1)变成(-1,1),方便插值计算
sampling_value_list = []
for lid_, (H_, W_) in enumerate(value_spatial_shapes): # 遍历每一个特征图
value_l_ = value_list[lid_].flatten(2).transpose(1, 2).reshape(N_*M_, D_, H_, W_) # 取出当前特征图的value,变换尺寸为(bs*head, head_dim, h_, w_),可以理解为将每个value map展平
sampling_grid_l_ = sampling_grids[:, :, :, lid_].transpose(1, 2).flatten(0, 1) # 取出当前特征图的采样点,变换尺寸为(bs*head, H*W, point, 2)
# 重点理解一下,每个tokens(所有特征图)在当前特征图每个方向的采样点,因为一个特征图的采样点要和
# 所有特征图该位置的tokens做attention
sampling_value_l_ = F.grid_sample(value_l_, sampling_grid_l_,
mode='bilinear', padding_mode='zeros', align_corners=False) # (bs*head, head_dim, H*W, point),所有tokens对于该特征图的采样点的values
sampling_value_list.append(sampling_value_l_)
# 这是比较难理解的,一个token会坐标对齐找到其他特征图的tokens'的归一化坐标,然后该tokens'在做偏移,然后插值得到values,此时的token会跟该采样点做attention,用的就是这个values
attention_weights = attention_weights.transpose(1, 2).reshape(N_*M_, 1, Lq_, L_*P_) # (bs, H*W, head, level, point) -> (bs*head, 1, H*W, level*point)
output = (torch.stack(sampling_value_list, dim=-2).flatten(-2) * attention_weights).sum(-1).view(N_, M_*D_, Lq_) #stack\flatten之后 (bs*head, head_dim, H*W, level*points)
# ×之后,(bs*head, head_dim, H*W, level*point)
# 求和 (bs*head, head_dim, H*W)
# view (bs, head*head_dim, H*W)
return output.transpose(1, 2).contiguous() # (bs, H*W, d_model)